G1 简介
一个 GC 实现通常需要关注三个方面1:
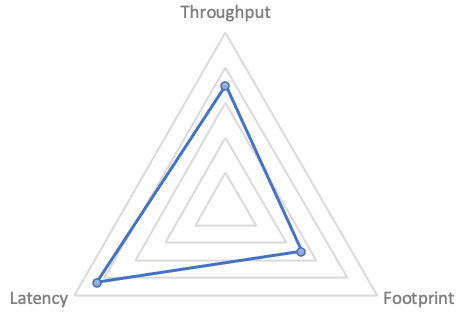
- 吞吐(Throughput): 单位时间内能回收的内存,越大越好
- 延时(Latency): GC 里主要关注的是 GC 的停顿,越小越好
- 资源占用(Footprint): GC 需要额外占用的内存、CPU,越小越好
吞吐越高,延时越大;低延时一般需要分阶段并行跑任务,占用更多资源;减小资源占用,如减少内存则需要更多的时间来换空间。可以用雷达图表示一个 GC 算法的侧重点(示例):
可预测性
实时处理很多时候会与“高速性”相关,但是,高速性其实只是实时处理的特征之一。对于实时处理来说,真正重要的特征是“可预测性”。2
在刚接触 G1 时听到的说法,G1 只需要调一个参数:目标停顿的时间。本质就是设定对停顿时间的预期。
尽管因为算法实现、程序负载等多方面的因素,G1 的停顿并没有办法 100% 在目标时间之内,但它内部采用了许多手段来尽力达到“停顿不超过目标时间”这个预期。包括收集并预测 GC 各个阶段的运行时间、延迟执行 GC、拆分 GC 目标等,来实现“软实时性”3。
从上面的三象限来说的话,G1 是个平衡的算法,从 JDK 9 开始,就成为了 JDK 的默认 GC 算法。JDK 后续版本也引入了一些低延时的算法,如 ZGC、Shenandoah GC,但它们都牺牲了吞吐,会占用更多 CPU 资源,并且也缺少 G1 这种以“可预测性”为目标做的优化。
分成区域实现细粒度回收
通常把内存认为是一个连续的数组,基于分代的 GC (generational GC) 虽然把大片内存分成了几个部分(如 Eden, Survival, Old 等),但在每个部分内还是当成一大片内存在处理。
G1 则不同,它会将内存划分成大小相等的区域(region)。用户可以随意设置区域的大小,但 G1 总会向上取整到某个 2^n。分配内存时,如果某个区域满了,则会通过空闲链
(free list)表找到下一个空闲的区域。使用空闲链表来管理空闲内存这招,其它算法也一样使用。如下图:

把内存分成区域是实现可预测性的重要手段,分成多个区域后,可以实现“增量 GC”,每次只回收一部分区域,来控制 GC 的停顿时间。对比 CMS 一次 Full GC 必须回收整个内存,如果内存较大,停顿时间一定会长,而 G1 可以选择性地回收一部分,分多次停顿。本质上是把回收的粒度打得更细了。
垃圾回收 = 识别 + 回收
下面简单介绍 G1 的整体流程,包含下面两个主要流程:
- concurrent marking(并发标记)。在尽量不暂停 mutator4 的前提下标记出存活对象5,还需要记录每个区域存活对象的数量,这个信息 evacuation 时会使用
- evacuation(比较难翻译,有翻译成“迁移”或“转移”的,这里保留英文)。负责将还存活的对象复制到其它空闲区域,将待回收的区域重新标记为空闲。
要注意的是,并发标记与 evacuation 是相互独立的,就算最新的标记任务做到一半, evacuation 还是可以利用之前的标记结果做回收的,毕竟 G1 每次回收并不会回收所有区域。(后续章节会讨论更多细节)
再以一个图来表达 evacuation 的内容:

紫色的是使用中的区域,evacuation 开始时,会从中选择一个或多个区域进行回收。回收时将区域中的活动对象复制到某个空闲的区域中。注意这个过程也起到了“压缩” (compact)的作用,所以它不会出现 CMS 出现的碎片化问题。
摘自中村成洋的《深入 Java 虚拟机》, p3
“硬实时”指的是如果超出某个时间,会发生严重后果,如手术机器人。“软实时”则表示要求虽然很高,但偶尔超出几次也没关系的情况
这个词是 Dijkstra 创造的,把它理解成应用程序就行。
目标是找出所有的垃圾,但我们做的是反向筛选,找出所有“非垃圾”,剩下的就是垃圾了,这个逻辑挺有趣的
引用自 https://plumbr.io/handbook/garbage-collection-in-java